
課程介紹
透過具有Mecanum Wheel輪子的AIOT的機器人系統滾動翻轉課程
|
單元1名稱:介紹如何操控Aiot自走車 |
|
單元2名稱: Aiot自走車麥輪(Mecanum Wheel) 行走原理與簡易Blocky程式控制 |
|
單元3名稱: Robomaster SDK python安裝與python版程式控制麥輪(Mecanum Wheel) 行走 |
|
單元4名稱:認識Aiot自走車的鏡頭辨識功能 |
|
單元5名稱:Aiot自走車的鏡頭辨識數字牌與旋轉雲台與瞄準射擊Blocky程式 |
|
單元6名稱:Aiot自走車的鏡頭辨識其他字走車與 PID控制旋轉雲台 |
|
單元7名稱: Aiot自走車的鏡頭辨識人或人偶與跟隨行走 |
|
單元8名稱: Aiot自走車的鏡頭辨識線與PID循跡車Blockly程式 |
|
單元9名稱:Aiot自走車的鏡頭辨識線與python版程式 |
|
單元10名稱:Aiot自走車的鏡頭辨識線、數字牌與循跡車射擊 |
課程活動
-
1.如何操控Aiot自走車

-
閱讀 > 1 分鐘 1.3 透過微軟copilot暨chatGPT4詢問mecanum wheel
-
閱讀 > 1 分鐘 1.4 無線網卡DRIVER
-
閱讀 > 1 分鐘 1.5 Robomaster EP規格表
-
閱讀 > 2 分鐘 1.6 用手機連線robomaster
-
需繳交, 03-18 11:00 1.7 ex1. 問ai有關mecanum wheel
-
2.Aiot自走車麥輪(Mecanum Wheel) 行走
-
閱讀 > 32 分鐘 2.1 麥輪操控與Robomaster單人競擊操作(311)
 32:26
32:26
-
閱讀 > 20 分鐘 2.2 履帶車、輪型車行走與麥輪車Robomaster
-
需繳交, 03-18 11:30 2.3 ex2 試車
-
-
3.自走車麥輪(Mecanum Wheel) 行走原理與簡易Blockly程式控制
-
閱讀 > 1 分鐘 3.1 mecanum wheel
-
分數 > 60, 03-25 11:30 3.2 318測驗
-
閱讀 > 3 分鐘 3.3 robomaster麥輪行進控制測驗講解(318)
-
需繳交, 03-26 00:00 3.4 ex3 Blockly控制麥輪
-
-
4.自走車的鏡頭辨識與旋轉雲台與瞄準射擊Blocky程式

-
閱讀 > 5 分鐘 4.1 Robomaster機器人辨識掌聲與辨識數字牌練習(325)05:41
-
閱讀 > 1 分鐘 4.2 辨識牌子並瞄準
-
閱讀 > 10 分鐘 4.3 Robomaster辨識掌聲與辨識 Robot練習
-
需繳交, 04-02 11:30 4.4 ex4 辨識字牌瞄準
-
-
5.PID與自動瞄準

-
閱讀 > 12 分鐘 5.1 詢問PID於gemini與copilot(401)
-
閱讀 > 1 分鐘 5.2 PID_shoot
-
閱讀 > 17 分鐘 5.3 Robotmaster以PID瞄準射擊行進中的小車17:29
-
閱讀 > 15 分鐘 5.4 PID瞄準射飛靶
-
需繳交, 04-08 10:30 5.5 ex5 AI介紹PID與PID自動瞄準實作
-
-
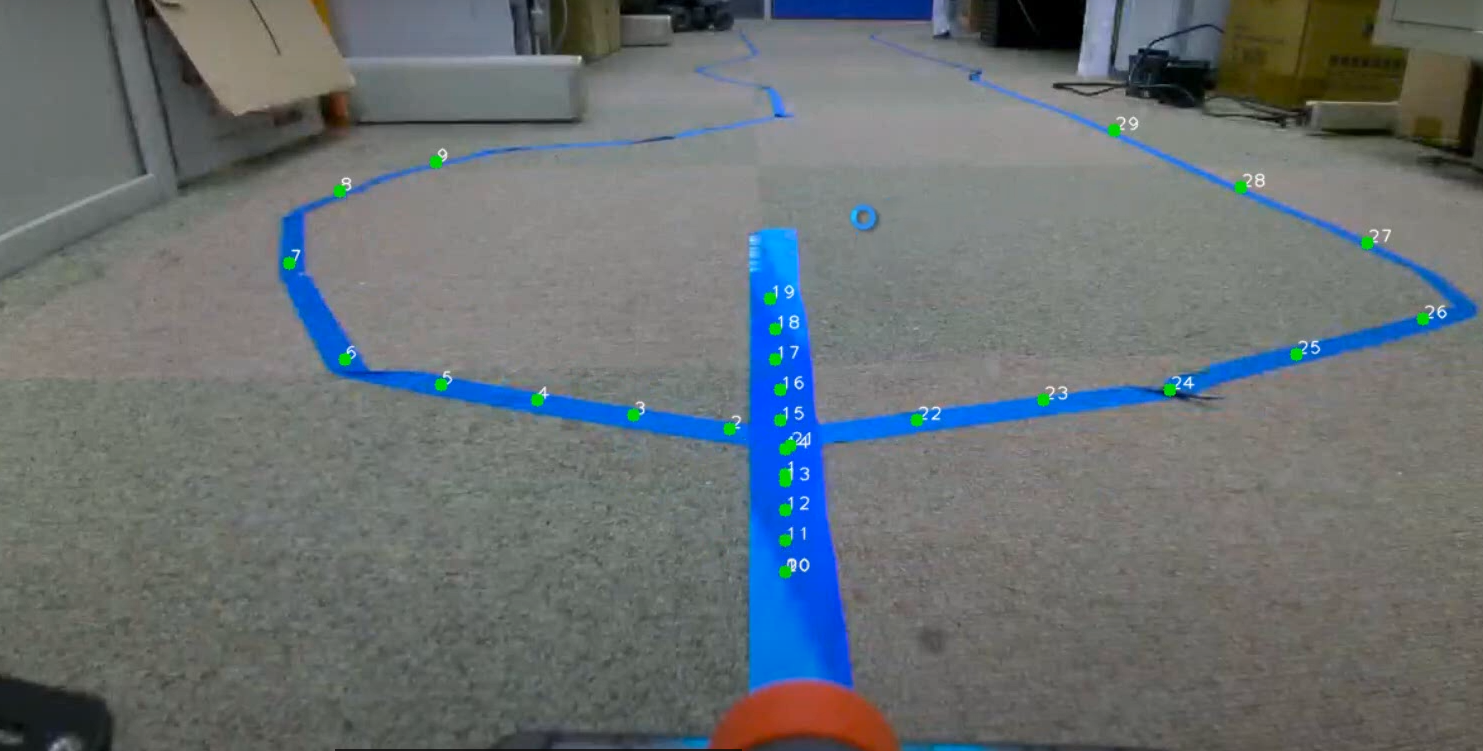
6.電腦視覺辨識線
-
閱讀 > 10 分鐘 6.2 robomaster電腦視覺鏡頭辨識線簡介與python展示(408)
-
閱讀 > 1 分鐘 6.3 robomaster sdk python辨識線的練習
-
需繳交, 04-15 11:30 6.4 ex6 循線車初探
-
7.PID循線車
-
閱讀 > 10 分鐘 7.1 辨識藍線pid循跡行走(415)
-
閱讀 > 8 分鐘 7.2 Mecanum輪Robomaster工程車PID循跡行走08:39
-
-
8.期中作業、期中考
-
需繳交, 04-29 11:00 8.1 期中作業
-
分數 > 60, 04-22 11:30 8.2 期中考
-
分數 > 60, 05-13 11:30 8.3 期中考訂正
-
閱讀 > 10 分鐘 8.4 AIOT mecanum變速循跡車實體與虛擬場地行走
-
-
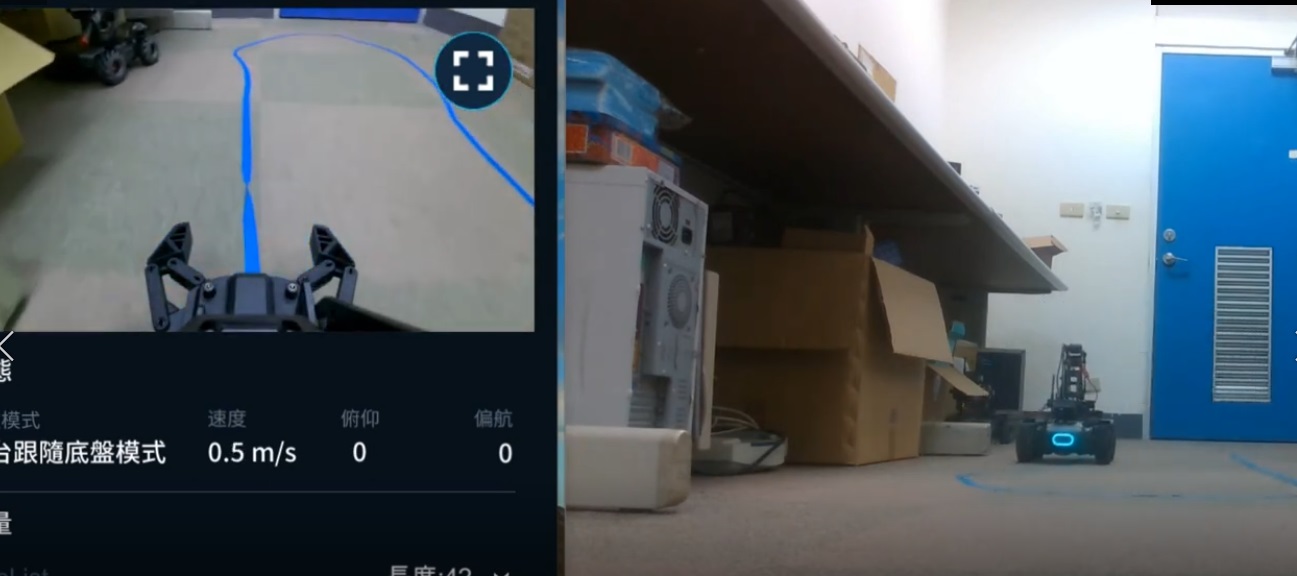
9.AIOT機器人與STEM
-
閱讀 > 5 分鐘 9.1 Robomaster AIOT車跟人操作
-
閱讀 > 15 分鐘 9.2 robomaster與stem題目探討(429)
-
需繳交, 05-06 11:30 9.3 ex7 車跟人
-
-
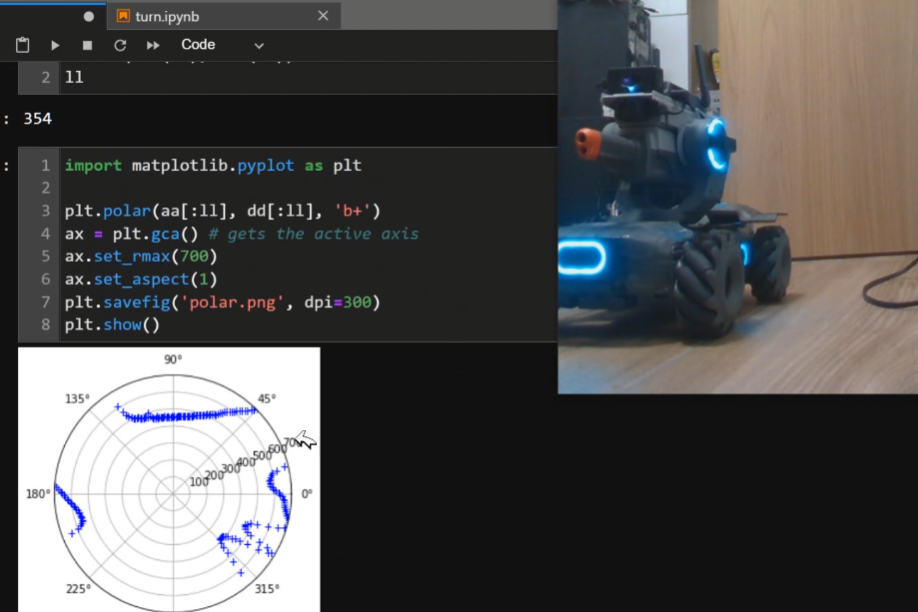
10.IR紅外線模組
-
閱讀 > 17 分鐘 10.1 AIOT機器人紅外線感測器測距與地形掃描(506)
-
閱讀 > 1 分鐘 10.2 infra_red_sensor
-
需繳交, 05-13 11:30 10.4 ex8 IR測距
-
-
11.綜合練習---循線車+紅外線測距
-
閱讀 > 12 分鐘 11.1 循跡車加上紅外線測距功能(513)
-
需繳交, 05-27 00:00 11.3 ex9 循線車+紅外線測距
-
-
12.綜合練習---循線車+辨識數字牌
-
閱讀 > 1 分鐘 12.1 aiot_robot
-
閱讀 > 12 分鐘 12.2 循跡車辨識號碼牌加上計時功能(520)
-
閱讀 > 7 分鐘 12.3 PID循跡車加上辨識數字功能
-
需繳交, 05-28 00:00 12.4 ex10 循線車+辨識數字牌
-
-
13.期末考527進行
-
分數 > 60, 05-27 11:00 13.1 期末考
-
-
14.同學作業展示
-
閱讀 > 1 分鐘 14.1 Blockly控制麥輪
-
閱讀 > 1 分鐘 14.2 辨識字牌瞄準
-
閱讀 > 1 分鐘 14.3 辨識字牌瞄準影片00:17
-
閱讀 > 1 分鐘 14.4 循線車+辨識數字牌 同學實做00:28
-
閱讀 > 1 分鐘 14.5 循跡車加上紅外線測距功能---同學實做 第三人稱視角00:22
-
閱讀 > 1 分鐘 14.6 循跡車加上紅外線測距功能---同學實做 第一人稱視角00:36
-
閱讀 > 1 分鐘 14.7 IR測距 同學實做VR場景00:19
-
